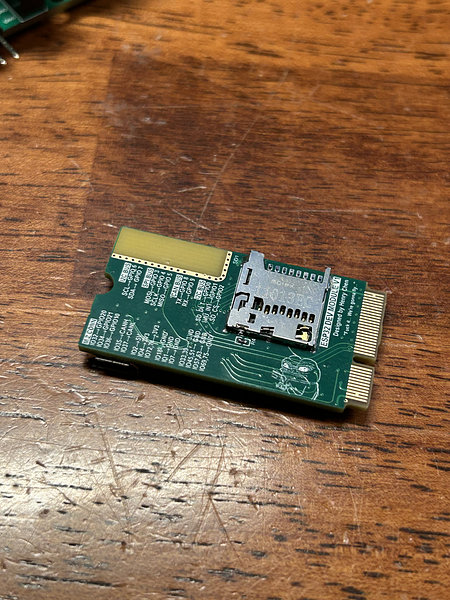
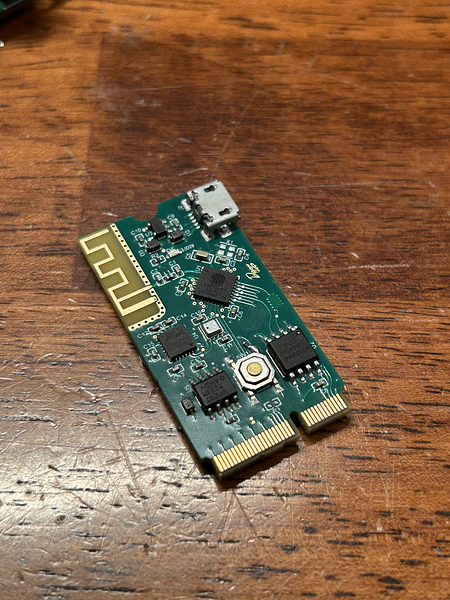
Thise flight computers were designed to be ultra small barebones flight computers with bluetooth and wifi functionality. These boards were designed with the ESP32-C3 and use CAN-Bus to communicate to other fllight subsystems. The on-board sensors include the MPU6050 (6-axis IMU) and BME280 (Temperature and Pressure Sensor). They were also a proof of concept for using Zephyr RTOS for projects built with different Microcontrollers.
Back view w/ reference and SD card
top view of board
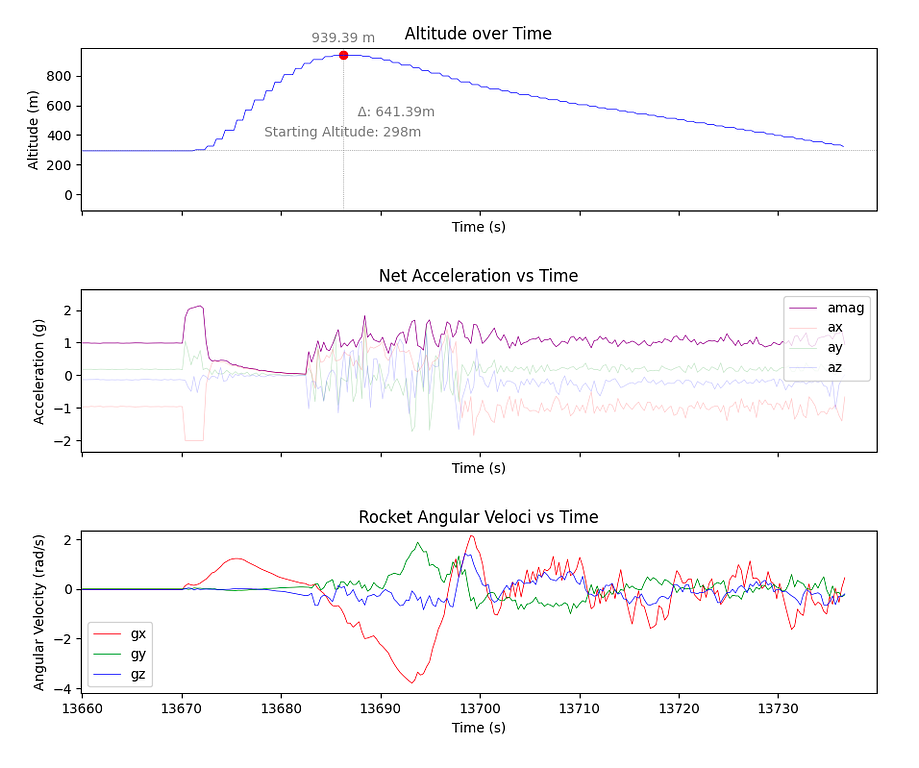
The device was successfully launched. The following flight data was acquired after the module was recovered. The barometer was used to measure the altitude over time.
Flight Data - excuse the spelling errors.
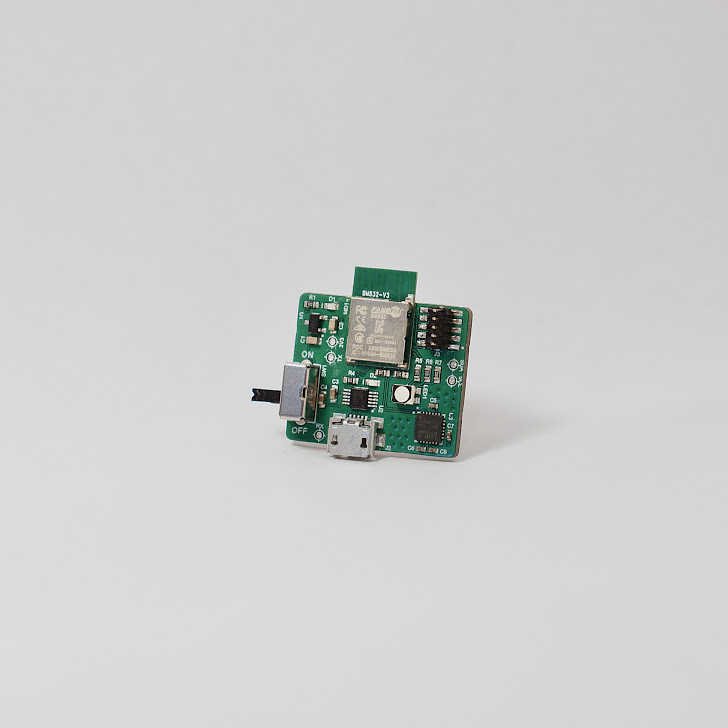
NRF52 BLE Mini IMU Board
This is a mini imu board that uses the nrf52 to read from the MPU6050 and transmit its values via bluetooth. it also outputs as uart for debug image.png137 KB
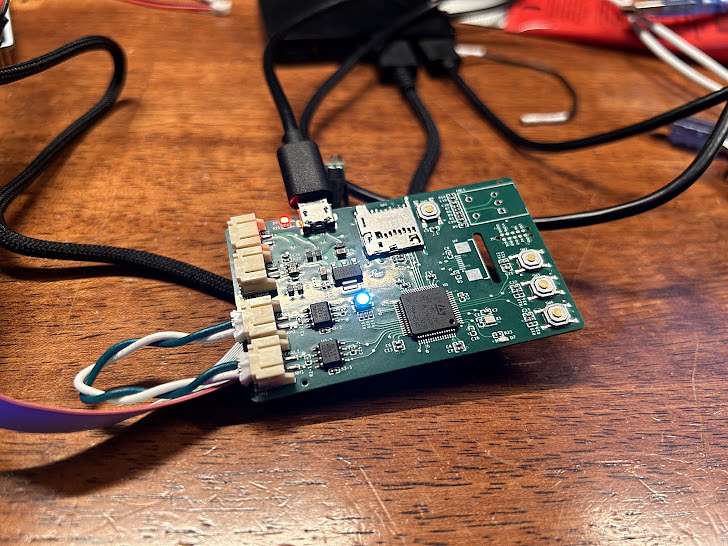
CAN Bus Debugger
This is a two-channel CAN Bus based on the STM32F446RE Chip. The device puts a UART/Serial Shell on the USB output - allowing easy communication with a laptop with Putty or Picocom installed. It's firmware is built with Zephyr RTOS. Additionally, with GitHub Actions and Commitizen, versioned firmware releases are possible.
image.png727 KB
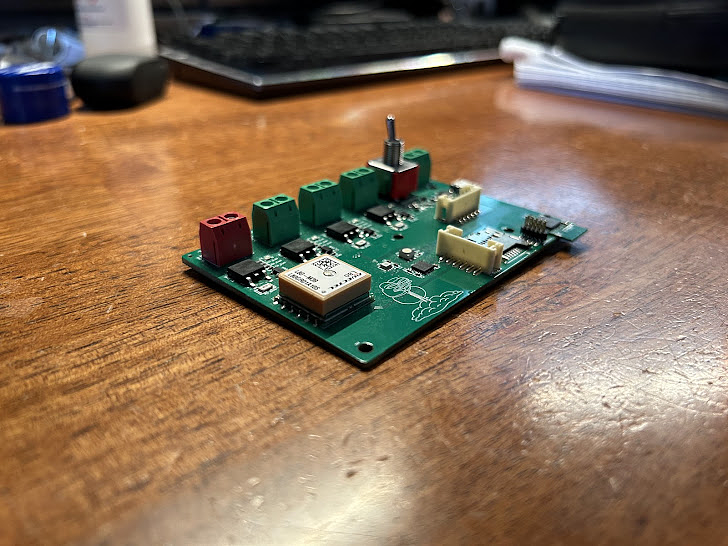
NRF52 Flight Computer
This was an NRF52 based flight computer based on the NRF52832. It features a GPS module and 4x5A current limited channels for igniting rocket motor. Dont mind the jank 😅 image.png612 KB
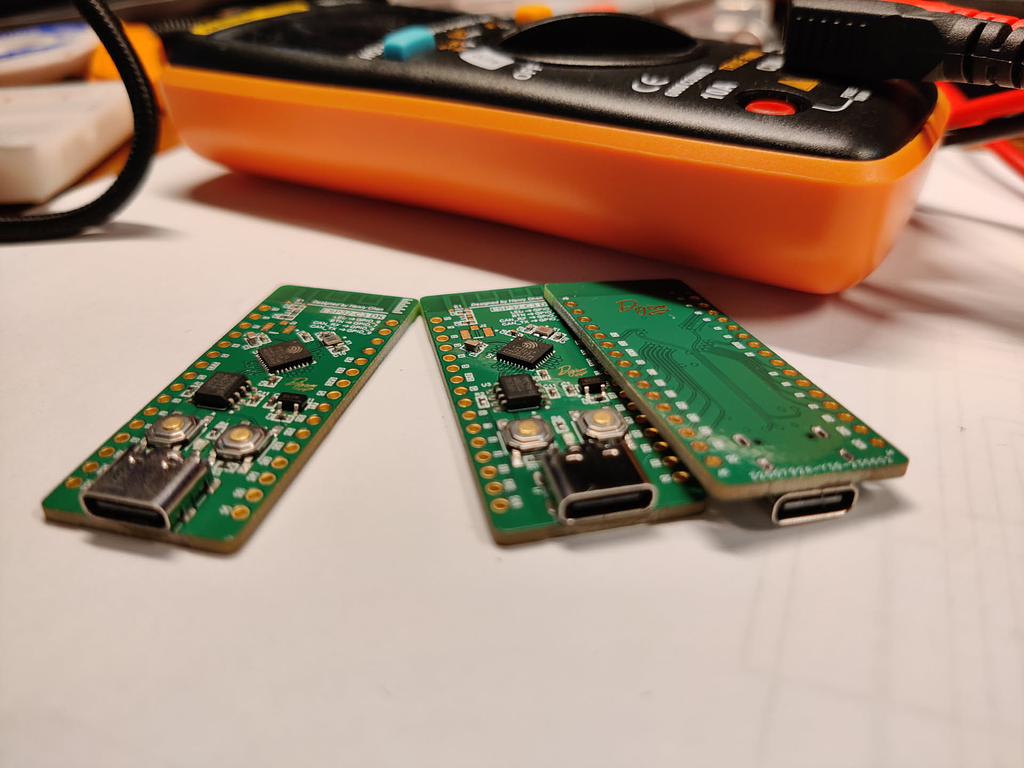
ESP32-C3 CAN Development Boards
These boards were used as a first test of the ESP32's CAN Bus functionality using Zephyr RTOS. image.png1.74 MB